According to my experience, most of the companies – who have a scanner or work with point clouds – are commonly refer for the details, which can be visible in the clouds. This topic pops up commonly in meetings, where companies are presenting clouds to the clients as basis of their mapping project, and even the smallest valves or road prisms can be spotted. But presentation and production are sort of different, and we – who are working on the extraction side – are aware of that. Some details are important, some are not. Some details can be spotted instantly, some details are hard to discover, and there are “invisible details”, which are there, but they require experience to be revealed. Above the experience, a good tool also required, and here comes the PointCloudScene software.
Vector extraction commonly aim for roads, railways or urban spaces. Companies use a very wide range of scanners, which are using different scanning patterns, Vector extraction commonly aims for roads, railways or urban spaces. Companies use a very wide range of scanners, which are using different scanning patterns, resolution, effective range or laser device, to map their environment. It is common that, the scanner’s properties are underrated. Point density and RGB clouds are commonly sell a project, but from my perspective, that’s clearly not enough. Performing a high quality mapping project from point cloud requires planning, knowing of the scanner and taking into account all the environmental factors. Let me highlight some good and bad practice for scanning and post-processing, and highlight a few detail-extraction aspects as well.
This is a subjective approach from my own experience, not an industrial standard, just a recommendation.
Scanning:
- Good practice
– Make sure that the operators are involved in scan planning. According the project scope some vector extraction aspects shall be taken into account.
– Over-kill is better than under-kill. Scan more than required. The density can be reduced, but if something is missing and re-scan is required, it can raise the costs. Also, some cases this is not possible at all. - Bad practice
– The scanner operator is not aware of the vector extraction process. If those, who will perform the extraction, are not involved in planning, or the surveyor person is not experienced in vector extraction, details can be lost right on the site because of the cloud density
– Scanning after rain or in wet environment. Water absorbs the laser beam in case of use of ToF scanners, and the intensity will be weaker. Weaker intensity will “hide” details, for example manholes in wet asphalt
Post-Processing:
- Good practice
– During the preparation of the cloud, try to avoid single, chunky clouds. Clouds per record or per scan position can help the operators extract details, as if some clouds are misaligned, single records or scan positions can be turned off, but if it’s merged, it’s quite sure you need to adjust in post-processing environment.
– Make sure you export all information, which the scanner collected. Intensity, RGB, number of returns, flight lines, source ID, and so on. All additional information can help the operators extract more details.
– One measurement is not measurement. Always have at least two measurements, where it is possible. In TLS systems, use overlap between scan positions, avoid places, where you have only one scan position. Using MLS systems, drive back and forth, if one record is faulty, have a backup. Also some details can be seen from another angle. - Bad practice
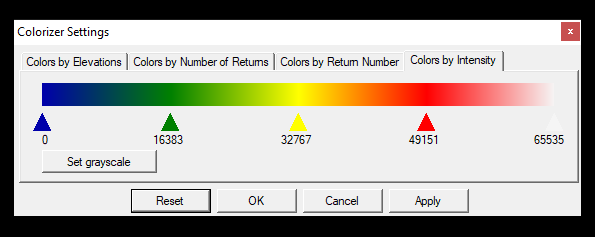
– It commonly happen that, some attributes are not written to the cloud files. Intensity is crucial, if you have an opportunity, export intensity with a 16 bit range. Keep an eye on the histogram, to fit this range, as this gives the biggest freedom to the operator.
– Using a point filter can cause problems, if it’s not set properly. Make sure that, all points are available for the operators, and do not remove additional points, if it’s not necessary, use tiling instead. Noise filter algorithm or wrong classification filters can cause trouble, keep an eye on them.
Extraction
This is the point, where PCS kicks in. The above mentioned points are limiting the opportunities of an operator to create a high quality dataset. PCS can help to enhance the operator’s possibilities. I also share a few tips, how to speed up the extraction using PCS or any other software.
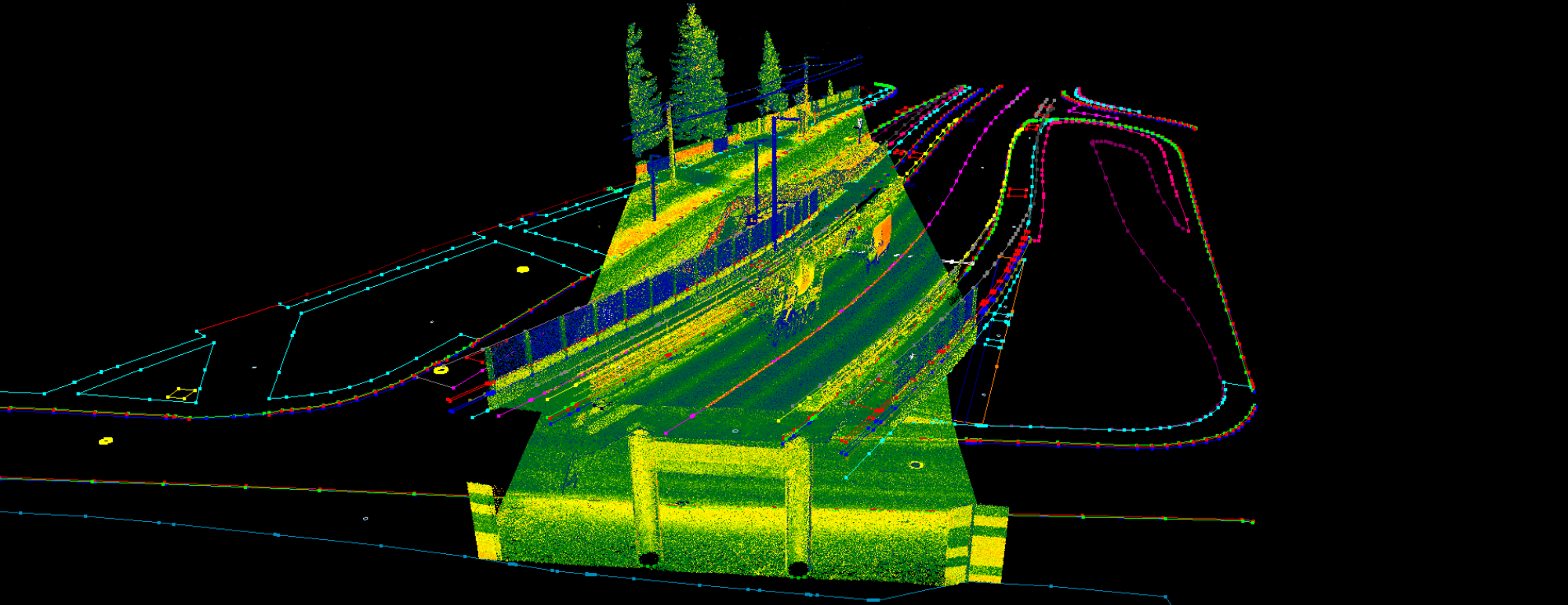
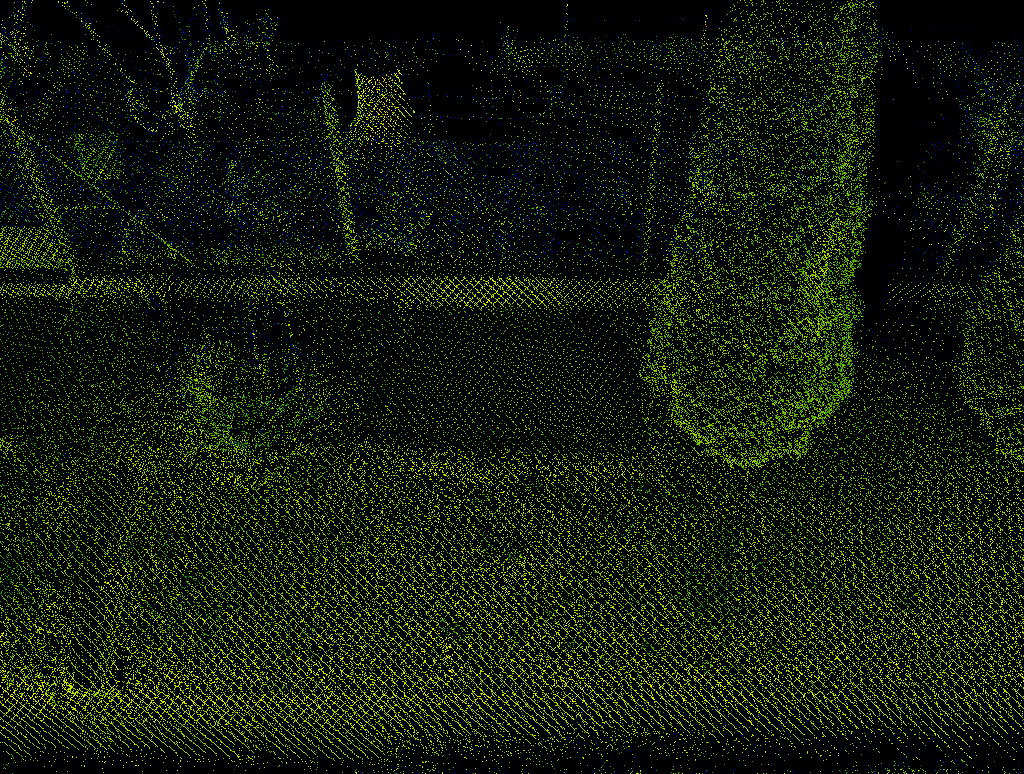
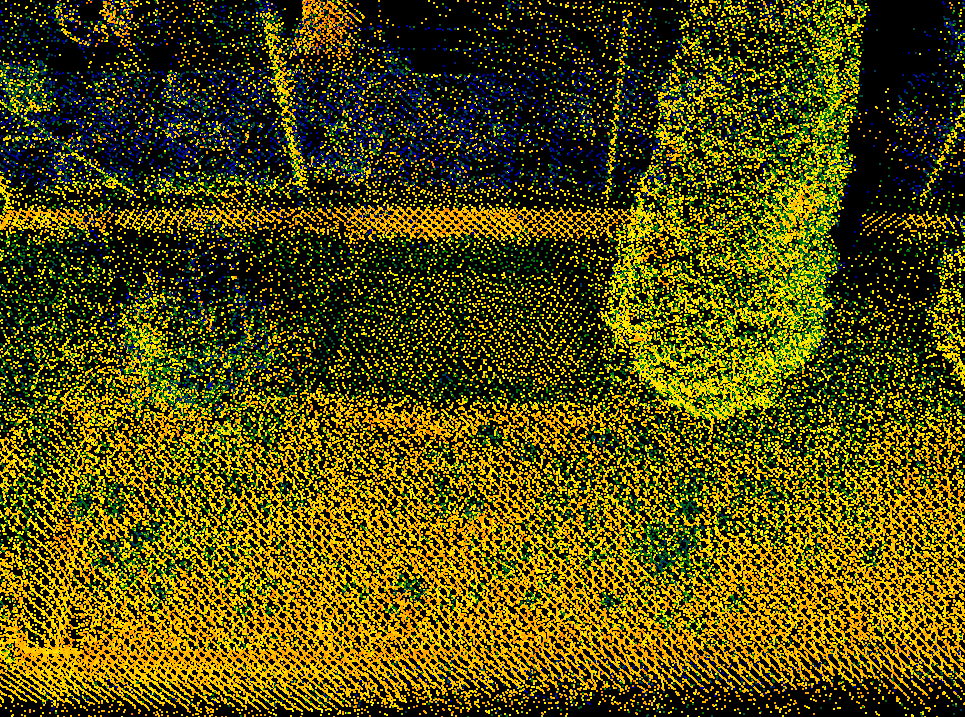
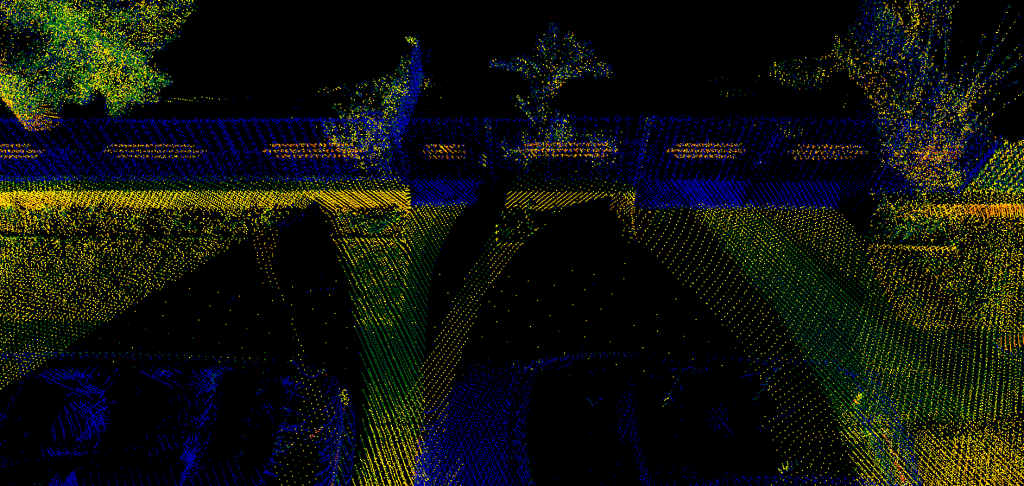
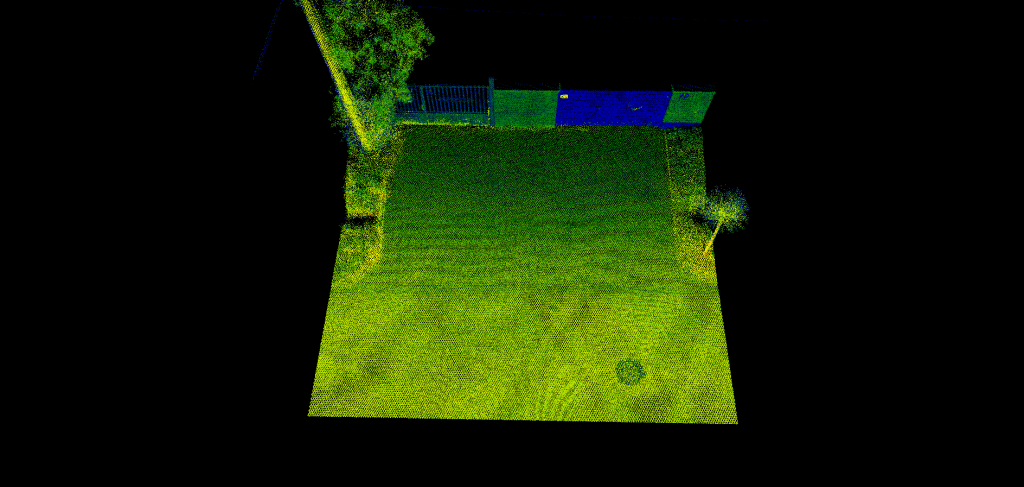
Set the right display for the clouds. Explore intensity ranges or other opportunities. For example PCS can offer Classification colours with intensity blending. This can help to spot details which you might not aware right on start or using default colouring options.
In PCS, you can modify the intensity histogram, combine elevation or classification with the intensity colour, turn on and off classes separately in 2D or 3D view, and modify the point size to see the details better. Bigger point size can be better for rare clouds, and smaller point size can help the extractions of the dense areas.
Modification of the display is key in vector extraction. RGB and nice and shiny displays and demos can sell the project, but when it comes to production, an experienced operator can be even more productive with the use of the right settings!
The world is built by engineers, who are aware of perpendiculars and construction rules. Details are commonly not seen, because there is no point cloud, but you still able to extract the information, if you think over, what is going on there. Curbs, pavements, bridges, and buildings: the information is there, you just need to recognise the rule or the pattern. With experience and time, it gets better and better and PCS offers practical tools to perform your interpolation.
Fixing horizontal layout is easy in 2D view, where the operator can extract the real situation even if it is just partly visible, not taking into account the elevation. After the lines are placed in 2D, using Modify Vertex Z tool can be used to pick elevation from the neighbour cloud points to adjust the elevation and have the right 3D geometry. Same can be applied for buildings, curbs, manholes, and so on, where the objects are partly not visible.
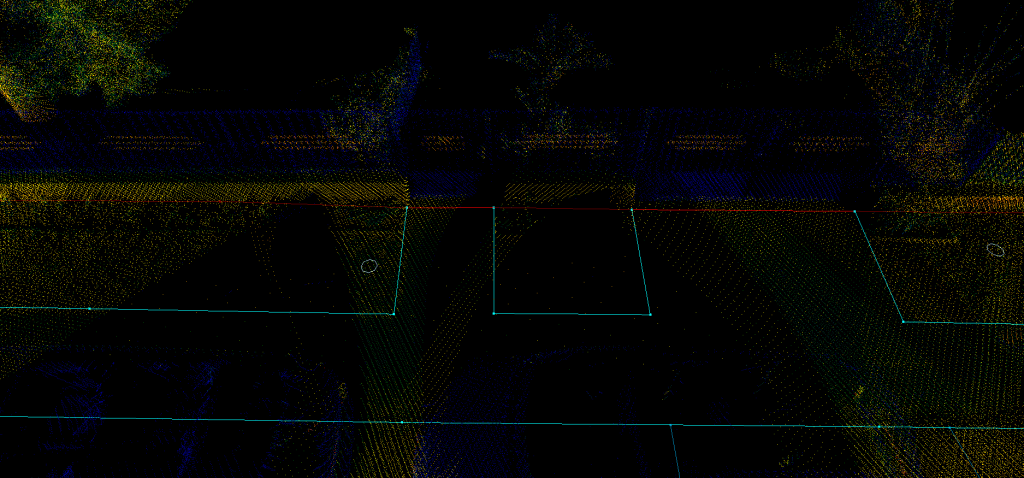
Probably everyone aware of optical illusions, where you can see a different image from a different perspective. This is the same with the clouds and vector extraction. It commonly happens that, road or pavement edge cannot be seen clearly. These situations can be clarified with the use of the cloud from the right angle. PCS offers a high-quality and high-capacity point cloud visualisation in 3D, which can help you to reach your goals.
2D extraction is common, where operators extract the vectors from a 2D view, as the elevation is not relevant for the project. However, there are some details, which can be seen from a 3D view, and also commonly happen that the linear objects can be visible from a steep angle, to reveal the point, where the next vertex shall be placed. This approach can be very useful at the edge of the clouds, where the density is lower or the intensity weaker. This method also helpful, if the intensity is generally weak (for example after rain). I always recommend that whenever it’s possible, use the 3D view for extraction!
I hope I could highlight a few aspects, which can be useful for you. PCS can help you to further enhance your vector extraction capabilities with useful tools. In the future posts I will highlight further tips and tricks, how to get more out of your clouds.
Do you have any questions? Are you interested in PCS? Just want to talk about scanning and clouds? Write us an email and let’s talk!
Thanks for your blog, nice to read. Do not stop.